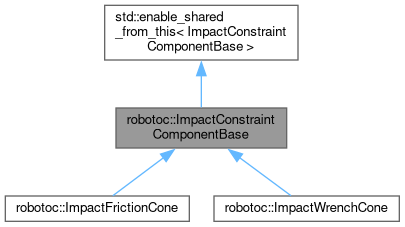
Base class for impact constraint components. More...
#include <impact_constraint_component_base.hpp>
Public Member Functions | |
| ImpactConstraintComponentBase (const double barrier=1.0e-03, const double fraction_to_boundary_rule=0.995) | |
| Constructor. More... | |
| virtual | ~ImpactConstraintComponentBase () |
| Destructor. More... | |
| ImpactConstraintComponentBase (const ImpactConstraintComponentBase &)=default | |
| Default copy constructor. More... | |
| ImpactConstraintComponentBase & | operator= (const ImpactConstraintComponentBase &)=default |
| Default copy operator. More... | |
| ImpactConstraintComponentBase (ImpactConstraintComponentBase &&) noexcept=default | |
| Default move constructor. More... | |
| ImpactConstraintComponentBase & | operator= (ImpactConstraintComponentBase &&) noexcept=default |
| Default move assign operator. More... | |
| virtual KinematicsLevel | kinematicsLevel () const =0 |
| Checks the kinematics level of the constraint component. More... | |
| virtual void | allocateExtraData (ConstraintComponentData &data) const =0 |
| Allocates extra data in ConstraintComponentData. More... | |
| virtual bool | isFeasible (Robot &robot, const ImpactStatus &impact_status, ConstraintComponentData &data, const SplitSolution &s) const =0 |
| Checks whether the current solution s is feasible or not. More... | |
| virtual void | setSlack (Robot &robot, const ImpactStatus &impact_status, ConstraintComponentData &data, const SplitSolution &s) const =0 |
| Sets the slack variables of each constraint components. More... | |
| virtual void | evalConstraint (Robot &robot, const ImpactStatus &impact_status, ConstraintComponentData &data, const SplitSolution &s) const =0 |
| Computes the primal residual, residual in the complementary slackness, and the log-barrier function of the slack varible. More... | |
| virtual void | evalDerivatives (Robot &robot, const ImpactStatus &impact_status, ConstraintComponentData &data, const SplitSolution &s, SplitKKTResidual &kkt_residual) const =0 |
| Computes the derivatives of the priaml residual, i.e., the Jacobian of the inequality constraint, and add the product of the Jacobian and the dual variable to the KKT residual. This function is always called just after evalConstraint(). More... | |
| virtual void | condenseSlackAndDual (const ImpactStatus &impact_status, ConstraintComponentData &data, SplitKKTMatrix &kkt_matrix, SplitKKTResidual &kkt_residual) const =0 |
| Condenses the slack and dual variables, i.e., factorizes the condensed Hessians and KKT residuals. This function is always called just after evalDerivatives(). More... | |
| virtual void | expandSlackAndDual (const ImpactStatus &impact_status, ConstraintComponentData &data, const SplitDirection &d) const =0 |
| Expands the slack and dual, i.e., computes the directions of the slack and dual variables from the directions of the primal variables. More... | |
| virtual int | dimc () const =0 |
| Returns the size of the constraint. More... | |
| void | setSlackAndDualPositive (ConstraintComponentData &data) const |
| Sets the slack and dual variables positive. More... | |
| double | maxSlackStepSize (const ConstraintComponentData &data) const |
| Computes and returns the maximum step size by applying fraction-to-boundary-rule to the direction of the slack variable. More... | |
| double | maxDualStepSize (const ConstraintComponentData &data) const |
| Computes and returns the maximum step size by applying fraction-to-boundary-rule to the direction of the dual variable. More... | |
| virtual double | getBarrierParam () const final |
| Returns the barrier parameter. More... | |
| virtual double | getFractionToBoundaryRule () const final |
| Returns the parameter of the fraction-to-boundary-rule. More... | |
| virtual void | setBarrierParam (const double barrier_param) final |
| Sets the barrier parameter. More... | |
| virtual void | setFractionToBoundaryRule (const double fraction_to_boundary_rule) final |
| Sets the parameter of the fraction-to-boundary-rule. More... | |
| template<typename Derived > | |
| std::shared_ptr< Derived > | as_shared_ptr () |
| Gets the shared ptr of this object as the specified type. If this fails in dynamic casting, throws an exception. More... | |
Static Public Member Functions | |
| static void | updateSlack (ConstraintComponentData &data, const double step_size) |
| Updates the slack variable according to the step size. More... | |
| static void | updateDual (ConstraintComponentData &data, const double step_size) |
| Updates the dual variable according to the step size. More... | |
Protected Member Functions | |
| void | computeComplementarySlackness (ConstraintComponentData &data) const |
| Computes the residual in the complementarity slackness between the slack and dual variables. More... | |
| void | computeComplementarySlackness (ConstraintComponentData &data, const int start, const int size) const |
| Computes the residual in the complementarity slackness between the slack and dual variables. More... | |
| template<int Size> | |
| void | computeComplementarySlackness (ConstraintComponentData &data, const int start) const |
| Computes the residual in the complementarity slackness between the slack and dual variables. More... | |
| double | computeComplementarySlackness (const double slack, const double dual) const |
| Computes the residual in the complementarity slackness between the slack and dual variables. More... | |
| template<typename VectorType > | |
| double | logBarrier (const Eigen::MatrixBase< VectorType > &slack) const |
| Computes the log barrier function of the slack variable. More... | |
Static Protected Member Functions | |
| static void | computeCondensingCoeffcient (ConstraintComponentData &data) |
| Computes the coefficient of the condensing. More... | |
| static void | computeCondensingCoeffcient (ConstraintComponentData &data, const int start, const int size) |
| Computes the coefficient of the condensing. More... | |
| template<int Size> | |
| static void | computeCondensingCoeffcient (ConstraintComponentData &data, const int start) |
| Computes the coefficient of the condensing. More... | |
| static double | computeCondensingCoeffcient (const double slack, const double dual, const double residual, const double cmpl) |
| Computes the residual in the complementarity slackness between the slack and dual variables. More... | |
| static void | computeDualDirection (ConstraintComponentData &data) |
| Computes the direction of the dual variable from slack, primal residual, complementarity slackness, and the direction of the slack. More... | |
| static void | computeDualDirection (ConstraintComponentData &data, const int start, const int size) |
| Computes the direction of the dual variable from slack, primal residual, complementarity slackness, and the direction of the slack. More... | |
| template<int Size> | |
| static void | computeDualDirection (ConstraintComponentData &data, const int start) |
| Computes the direction of the dual variable from slack, primal residual, complementary slackness, and the direction of the slack. More... | |
| static double | computeDualDirection (const double slack, const double dual, const double dslack, const double cmpl) |
| Computes the direction of the dual variable from slack, primal residual, complementary slackness, and the direction of the slack. More... | |
Detailed Description
Base class for impact constraint components.
Constructor & Destructor Documentation
◆ ImpactConstraintComponentBase() [1/3]
| robotoc::ImpactConstraintComponentBase::ImpactConstraintComponentBase | ( | const double | barrier = 1.0e-03, |
| const double | fraction_to_boundary_rule = 0.995 |
||
| ) |
Constructor.
- Parameters
-
[in] barrier Barrier parameter. Must be positive. Should be small. Default is 1.0e-03. [in] fraction_to_boundary_rule Parameter of the fraction-to-boundary-rule Must be larger than 0 and smaller than 1. Should be between 0.9 and 0.995. Default is 0.995.
◆ ~ImpactConstraintComponentBase()
|
inlinevirtual |
Destructor.
◆ ImpactConstraintComponentBase() [2/3]
|
default |
Default copy constructor.
◆ ImpactConstraintComponentBase() [3/3]
|
defaultnoexcept |
Default move constructor.
Member Function Documentation
◆ allocateExtraData()
|
pure virtual |
Allocates extra data in ConstraintComponentData.
- Parameters
-
[in] data Constraint component data.
Implemented in robotoc::ImpactFrictionCone, and robotoc::ImpactWrenchCone.
◆ as_shared_ptr()
|
inline |
Gets the shared ptr of this object as the specified type. If this fails in dynamic casting, throws an exception.
- Template Parameters
-
Derived The derived type.
- Returns
- shared ptr of this object as the specified type.
◆ computeComplementarySlackness() [1/4]
|
inlineprotected |
Computes the residual in the complementarity slackness between
the slack and dual variables.
- Parameters
-
[in] slack An element of the slack variable. [in] dual An element of the dual variable.
- Returns
- The complementarity slackness between the slack and dual variables.
◆ computeComplementarySlackness() [2/4]
|
inlineprotected |
Computes the residual in the complementarity slackness between
the slack and dual variables.
- Parameters
-
[in,out] data Constraint data.
◆ computeComplementarySlackness() [3/4]
|
inlineprotected |
Computes the residual in the complementarity slackness between
the slack and dual variables.
- Parameters
-
[in,out] data Constraint data. [in] start Start position of the segment.
- Template Parameters
-
Size Size of the segment.
◆ computeComplementarySlackness() [4/4]
|
inlineprotected |
Computes the residual in the complementarity slackness between
the slack and dual variables.
- Parameters
-
[in,out] data Constraint data. [in] start Start position of the segment. [in] size Size of the segment.
◆ computeCondensingCoeffcient() [1/4]
|
inlinestaticprotected |
Computes the residual in the complementarity slackness between
the slack and dual variables.
- Parameters
-
[in] slack An element of the slack variable. [in] dual An element of the dual variable. [in] residual An element of the primal residual. [in] cmpl An element of the complementarity slackness.
- Returns
- Coefficient of the condensing.
◆ computeCondensingCoeffcient() [2/4]
|
inlinestaticprotected |
Computes the coefficient of the condensing.
- Parameters
-
[in,out] data Constraint component data.
◆ computeCondensingCoeffcient() [3/4]
|
inlinestaticprotected |
Computes the coefficient of the condensing.
- Parameters
-
[in,out] data Constraint data. [in] start Start position of the segment.
- Template Parameters
-
Size Size of the segment.
◆ computeCondensingCoeffcient() [4/4]
|
inlinestaticprotected |
Computes the coefficient of the condensing.
- Parameters
-
[in,out] data Constraint data. [in] start Start position of the segment. [in] size Size of the segment.
◆ computeDualDirection() [1/4]
|
inlinestaticprotected |
Computes the direction of the dual variable from slack, primal residual, complementary slackness, and the direction of the slack.
- Parameters
-
[in] slack The slack variable. [in] dual The dual variable. [in] dslack The direction of the slack variable. [in] cmpl The complementary slackness.
- Returns
- The direction of the dual variable.
◆ computeDualDirection() [2/4]
|
inlinestaticprotected |
Computes the direction of the dual variable from slack, primal residual, complementarity slackness, and the direction of the slack.
- Parameters
-
[in,out] data Constraint data.
◆ computeDualDirection() [3/4]
|
inlinestaticprotected |
Computes the direction of the dual variable from slack, primal residual, complementary slackness, and the direction of the slack.
- Parameters
-
[in,out] data Constraint data. [in] start Start position of the segment.
- Template Parameters
-
Size Size of the segment.
◆ computeDualDirection() [4/4]
|
inlinestaticprotected |
Computes the direction of the dual variable from slack, primal residual, complementarity slackness, and the direction of the slack.
- Parameters
-
[in,out] data Constraint data. [in] start Start position of the segment. [in] size Size of the segment.
◆ condenseSlackAndDual()
|
pure virtual |
Condenses the slack and dual variables, i.e., factorizes the
condensed Hessians and KKT residuals. This function is always called just after evalDerivatives().
- Parameters
-
[in] impact_status Impact status. [in] data Constraints data. [out] kkt_matrix Impact split KKT matrix. The condensed Hessians
are added to this data.[out] kkt_residual Impact split KKT residual. The condensed KKT residual are added to this data.
Implemented in robotoc::ImpactFrictionCone, and robotoc::ImpactWrenchCone.
◆ dimc()
|
pure virtual |
Returns the size of the constraint.
- Returns
- Size of the constraints.
Implemented in robotoc::ImpactFrictionCone, and robotoc::ImpactWrenchCone.
◆ evalConstraint()
|
pure virtual |
Computes the primal residual, residual in the complementary slackness, and the log-barrier function of the slack varible.
- Parameters
-
[in] robot Robot model. [in] impact_status Impact status. [in] data Constraints data. [in] s Impact split solution.
Implemented in robotoc::ImpactFrictionCone, and robotoc::ImpactWrenchCone.
◆ evalDerivatives()
|
pure virtual |
Computes the derivatives of the priaml residual, i.e., the Jacobian of the inequality constraint, and add the product of the Jacobian and the dual variable to the KKT residual. This function is always called just after evalConstraint().
- Parameters
-
[in] robot Robot model. [in] impact_status Impact status. [in] data Constraint data. [in] s Impact split solution. [out] kkt_residual Impact split KKT residual.
Implemented in robotoc::ImpactFrictionCone, and robotoc::ImpactWrenchCone.
◆ expandSlackAndDual()
|
pure virtual |
Expands the slack and dual, i.e., computes the directions of the slack and dual variables from the directions of the primal variables.
- Parameters
-
[in] impact_status Impact status. [in,out] data Constraints data. [in] d Impact split direction.
Implemented in robotoc::ImpactFrictionCone, and robotoc::ImpactWrenchCone.
◆ getBarrierParam()
|
finalvirtual |
Returns the barrier parameter.
◆ getFractionToBoundaryRule()
|
finalvirtual |
Returns the parameter of the fraction-to-boundary-rule.
◆ isFeasible()
|
pure virtual |
Checks whether the current solution s is feasible or not.
- Parameters
-
[in] robot Robot model. [in] impact_status Impact status. [in] data Constraint data. [in] s Impact split solution.
- Returns
- true if s is feasible. false if not.
Implemented in robotoc::ImpactFrictionCone, and robotoc::ImpactWrenchCone.
◆ kinematicsLevel()
|
pure virtual |
Checks the kinematics level of the constraint component.
- Returns
- Kinematics level of the constraint component.
Implemented in robotoc::ImpactFrictionCone, and robotoc::ImpactWrenchCone.
◆ logBarrier()
|
inlineprotected |
Computes the log barrier function of the slack variable.
- Parameters
-
[in] slack Slack variable. All the components must be positive.
- Returns
- log barrier function of the slack variable.
◆ maxDualStepSize()
|
inline |
Computes and returns the maximum step size by applying fraction-to-boundary-rule to the direction of the dual variable.
- Parameters
-
[in] data Constraint data.
- Returns
- Maximum step size regarding the dual variable.
◆ maxSlackStepSize()
|
inline |
Computes and returns the maximum step size by applying fraction-to-boundary-rule to the direction of the slack variable.
- Parameters
-
[in] data Constraint data.
- Returns
- Maximum step size regarding the slack variable.
◆ operator=() [1/2]
|
default |
Default copy operator.
◆ operator=() [2/2]
|
defaultnoexcept |
Default move assign operator.
◆ setBarrierParam()
|
finalvirtual |
Sets the barrier parameter.
- Parameters
-
[in] barrier_param Barrier parameter. Must be positive. Should be small.
◆ setFractionToBoundaryRule()
|
finalvirtual |
Sets the parameter of the fraction-to-boundary-rule.
- Parameters
-
[in] fraction_to_boundary_rule Must be larger than 0 and smaller than 1. Should be between 0.9 and 0.995.
◆ setSlack()
|
pure virtual |
Sets the slack variables of each constraint components.
- Parameters
-
[in] robot Robot model. [in] impact_status Impact status. [out] data Constraint data. [in] s Impact split solution.
Implemented in robotoc::ImpactFrictionCone, and robotoc::ImpactWrenchCone.
◆ setSlackAndDualPositive()
| void robotoc::ImpactConstraintComponentBase::setSlackAndDualPositive | ( | ConstraintComponentData & | data | ) | const |
Sets the slack and dual variables positive.
- Parameters
-
[in,out] data Constraint data.
◆ updateDual()
|
inlinestatic |
Updates the dual variable according to the step size.
- Parameters
-
[in,out] data Constraint data. [in] step_size Step size.
◆ updateSlack()
|
inlinestatic |
Updates the slack variable according to the step size.
- Parameters
-
[in,out] data Constraint data. [in] step_size Step size.
The documentation for this class was generated from the following files:
- /github/workspace/include/robotoc/constraints/impact_constraint_component_base.hpp
- /github/workspace/include/robotoc/constraints/impact_constraint_component_base.hxx