Loading...
Searching...
No Matches
contact_sequence.hpp File Reference
#include <deque>#include <iostream>#include <memory>#include <cassert>#include "robotoc/robot/robot.hpp"#include "robotoc/robot/se3.hpp"#include "robotoc/utils/aligned_vector.hpp"#include "robotoc/robot/contact_status.hpp"#include "robotoc/robot/impact_status.hpp"#include "robotoc/planner/discrete_event.hpp"
Include dependency graph for contact_sequence.hpp:

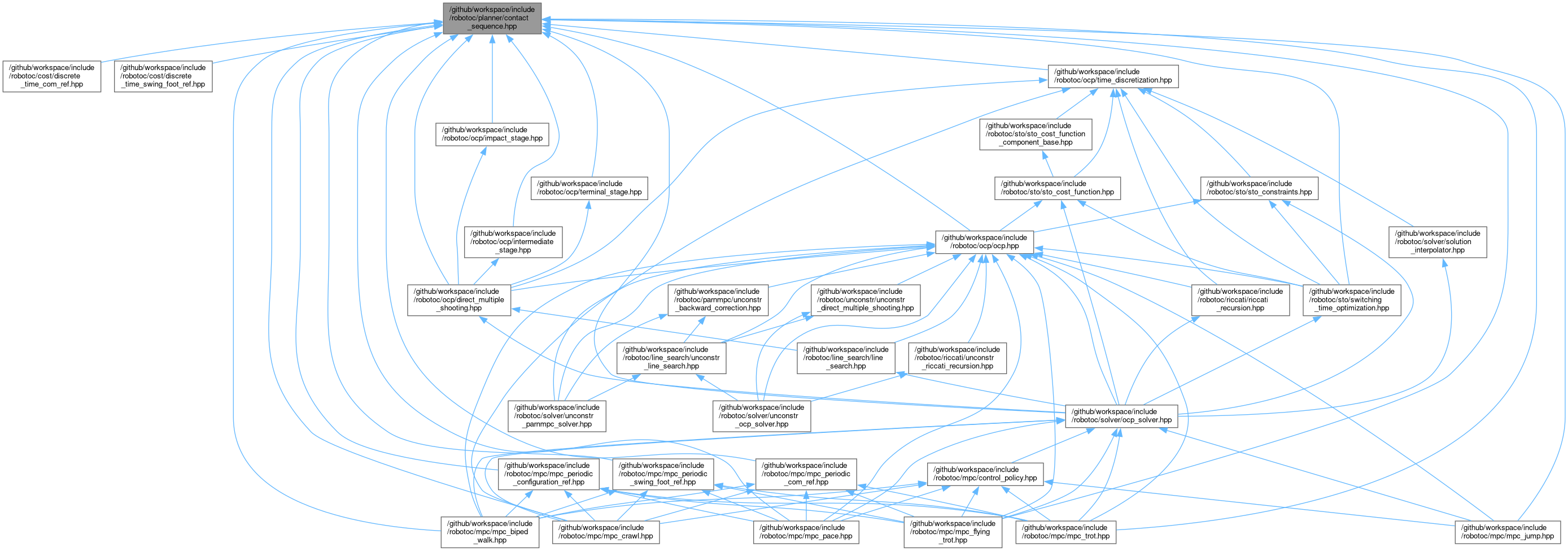
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | robotoc::ContactSequence |
| The sequence of contact status and discrete events (impact and lift). More... | |
Namespaces | |
| namespace | robotoc |