Loading...
Searching...
No Matches
riccati_factorizer.hpp File Reference
#include "Eigen/Core"#include "Eigen/LU"#include "robotoc/robot/robot.hpp"#include "robotoc/core/split_kkt_matrix.hpp"#include "robotoc/core/split_kkt_residual.hpp"#include "robotoc/core/split_direction.hpp"#include "robotoc/riccati/split_riccati_factorization.hpp"#include "robotoc/riccati/lqr_policy.hpp"#include "robotoc/riccati/sto_policy.hpp"#include "robotoc/riccati/backward_riccati_recursion_factorizer.hpp"#include "robotoc/riccati/split_constrained_riccati_factorization.hpp"#include <limits>#include <cmath>
Include dependency graph for riccati_factorizer.hpp:

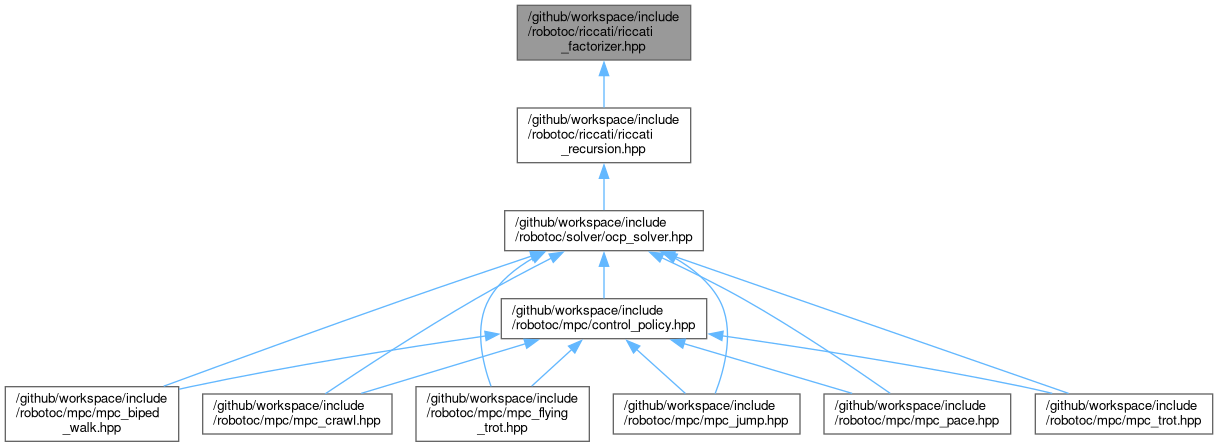
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | robotoc::RiccatiFactorizer |
| Riccati factorizer. More... | |
Namespaces | |
| namespace | robotoc |
Functions | |
| void | robotoc::forwardRiccatiRecursion (const SplitKKTMatrix &kkt_matrix, const SplitKKTResidual &kkt_residual, const LQRPolicy &lqr_policy, SplitDirection &d, SplitDirection &d_next, const bool sto, const bool has_next_sto_phase) |
| Performs the forward Riccati recursion and computes the state direction. More... | |
| void | robotoc::forwardRiccatiRecursion (const SplitKKTMatrix &kkt_matrix, const SplitKKTResidual &kkt_residual, const SplitDirection &d, SplitDirection &d_next) |
| Performs the forward Riccati recursion and computes the state direction. More... | |
| void | robotoc::computeSwitchingTimeDirection (const STOPolicy &sto_policy, SplitDirection &d, const bool has_prev_sto_phase) |
| Computes the switching time direction. More... | |
| void | robotoc::computeCostateDirection (const SplitRiccatiFactorization &riccati, SplitDirection &d, const bool sto, const bool has_next_sto_phase) |
| Computes the Newton direction of the costate. More... | |
| void | robotoc::computeCostateDirection (const SplitRiccatiFactorization &riccati, SplitDirection &d, const bool sto) |
| Computes the Newton direction of the costate. More... | |
| void | robotoc::computeLagrangeMultiplierDirection (const SplitRiccatiFactorization &riccati, SplitDirection &d, const bool sto, const bool has_next_sto_phase) |
| Computes the Newton direction of the Lagrange multiplier with respect to the switching constraint. More... | |