Loading...
Searching...
No Matches
unconstr_state_equation.hpp File Reference
#include "Eigen/Core"#include "robotoc/core/split_solution.hpp"#include "robotoc/core/split_kkt_residual.hpp"#include "robotoc/core/split_kkt_matrix.hpp"
Include dependency graph for unconstr_state_equation.hpp:

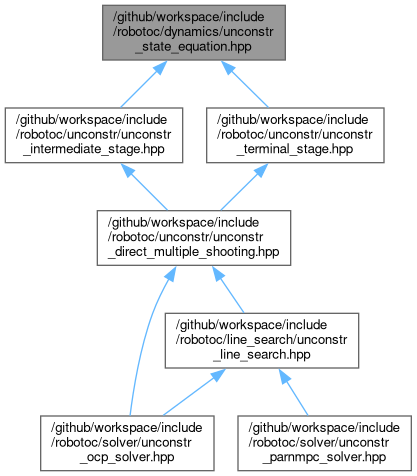
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | robotoc |
Functions | |
| void | robotoc::linearizeUnconstrForwardEuler (const double dt, const SplitSolution &s, const SplitSolution &s_next, SplitKKTMatrix &kkt_matrix, SplitKKTResidual &kkt_residual) |
| Linearizes the state equation of forward Euler. More... | |
| void | robotoc::linearizeUnconstrForwardEulerTerminal (const SplitSolution &s, SplitKKTResidual &kkt_residual) |
| Linearizes the state equation of forward Euler. More... | |
| void | robotoc::linearizeUnconstrBackwardEuler (const double dt, const Eigen::VectorXd &q_prev, const Eigen::VectorXd &v_prev, const SplitSolution &s, const SplitSolution &s_next, SplitKKTMatrix &kkt_matrix, SplitKKTResidual &kkt_residual) |
| Linearizes the state equation of backward Euler. More... | |
| void | robotoc::linearizeUnconstrBackwardEulerTerminal (const double dt, const Eigen::VectorXd &q_prev, const Eigen::VectorXd &v_prev, const SplitSolution &s, SplitKKTMatrix &kkt_matrix, SplitKKTResidual &kkt_residual) |
| Linearizes the state equation of backward Euler at the terminal stage. More... | |
| void | robotoc::evalUnconstrForwardEuler (const double dt, const SplitSolution &s, const SplitSolution &s_next, SplitKKTResidual &kkt_residual) |
| Computes the residual in the state equation of forward Euler. More... | |
| void | robotoc::evalUnconstrBackwardEuler (const double dt, const Eigen::VectorXd &q_prev, const Eigen::VectorXd &v_prev, const SplitSolution &s, SplitKKTResidual &kkt_residual) |
| Computes the residual in the state equation of backward Euler. More... | |